aireinforcement-learning
reinforcement-learning

Semiconductor Engineering

Hacker News
aimachine-learningreinforcement-learning

DEV Community
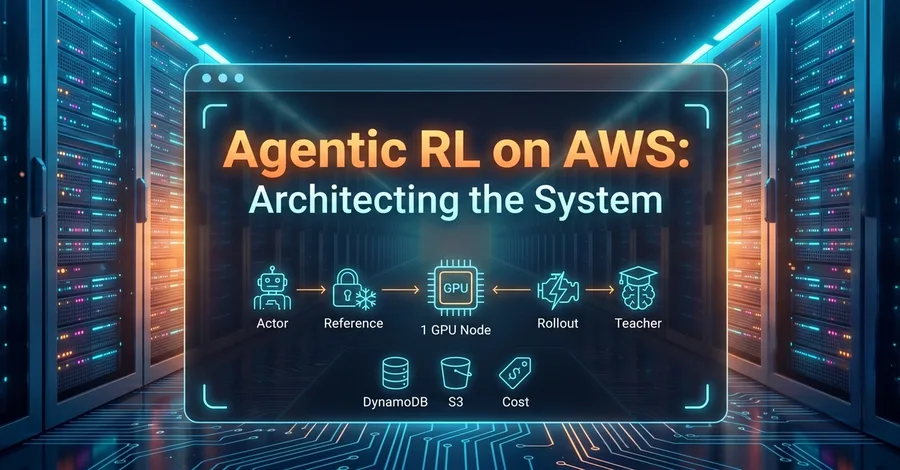
aireinforcement-learning
DEV Community
aimachine-learningreinforcement-learning

Robotics Institute Carnegie Mellon University
aimachine-learningreinforcement-learningrobotics

Frontiers in Computer Science | New and Recent Articles
Muhammad Hafidz Fazli Bin Md Fauadi
4d ago
aicomputer-scienceiotreinforcement-learning

Scientific Reports
Fang Shiyu
5d ago
aideep-learningreinforcement-learning

Frontiers in Artificial Intelligence | New and Recent Articles
Sivakumar Nagarajan
6d ago
aideep-learningreinforcement-learning

Research Communities by Springer Nature
Manish Kumar Dixit
6d ago
aideep-learningreinforcement-learning
Hacker News
aireinforcement-learning

Lifeboat News: The Blog
aimachine-learningreinforcement-learning
Hacker News

Jiacheng; Zhang; Xinyu; Shunkai; Wang; Yanmohan; Lin; Qin; Tiancheng; Zhu; Zhengmao; Tianle; Jingyang; Zehan; Jiang; Binyang; Ding; Han; Fei; Du; Chenyu; Song; Zijian; Jiayuan; Zhi; Huang; Yunan; Cheng; Weiyu; Zhao; Pengyu
9d ago
aicomputer-sciencegenerative-aimachine-learningreinforcement-learning

Nature Communications
aimachine-learningreinforcement-learning
Nature Communications
Wei Pan
13d ago
aiengineeringreinforcement-learningrobotics
Scientific Reports
Yutaka Sakai
14d ago
aireinforcement-learning
DEV Community
aimachine-learningreinforcement-learning
DEV Community
Saurav Bhattacharya
16d ago
aimachine-learningreinforcement-learning

Towards Data Science

Ananya Bhattacharyya
16d ago
aireinforcement-learning
DEV Community
aireinforcement-learning

Agentic AI / Generative AI – NVIDIA Technical Blog
aimachine-learningnlpreinforcement-learning
Sign up to keep scrolling
Create your feed subscriptions, save articles, keep scrolling.
Already have an account?